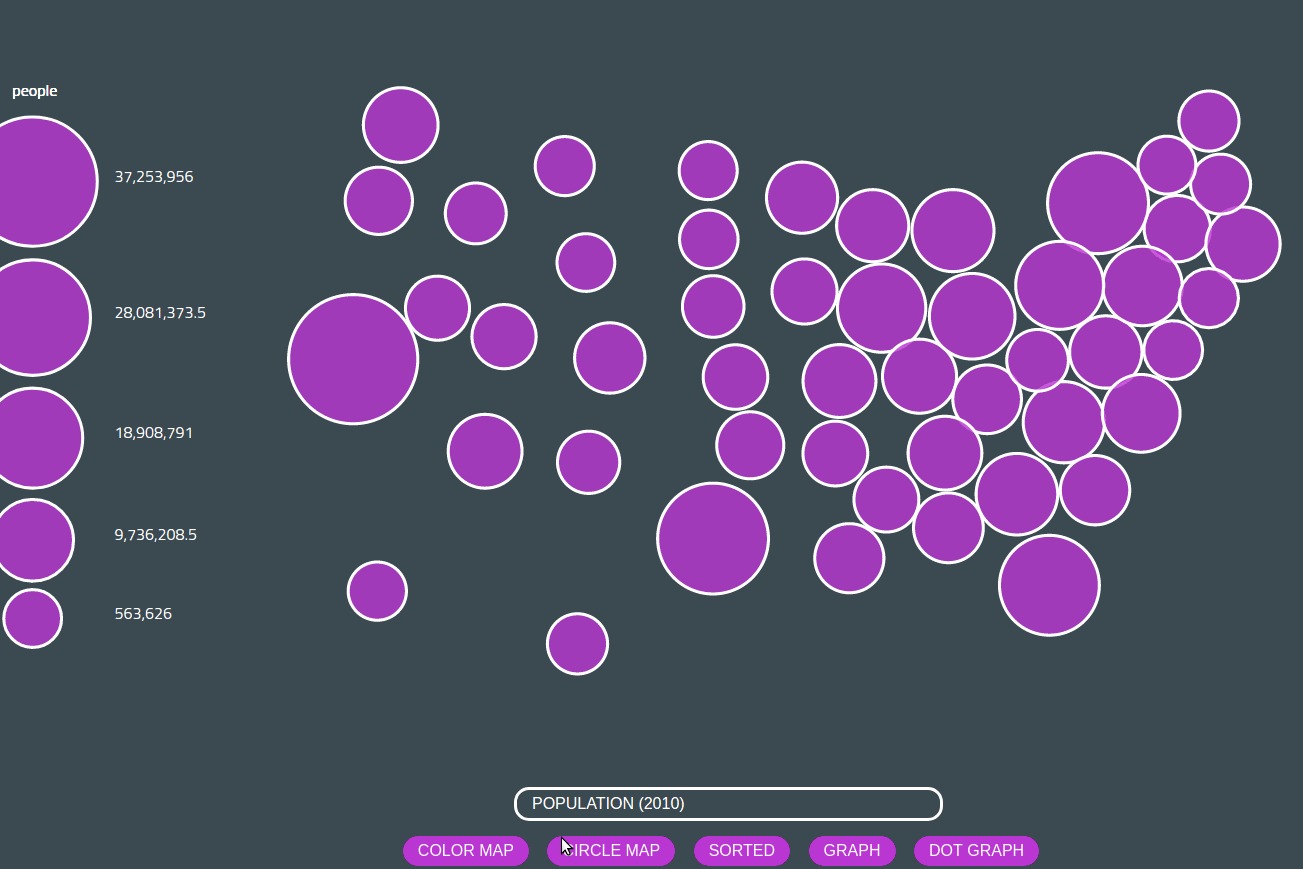
Dynamic United States
A playful integration of several data visualization techniques for an interactive visualization and comparison of United States data. Check out the source on GitHub.

Water
A static visualization of the United States' water usage per annum, broken down to ultimately show the water used by Cornell university against the rest of the country. Check out the source on GitHub.